Compute a Bayesian equivalent of the p-value, related to the odds that a parameter (described by its posterior distribution) has against the null hypothesis (h0) using Mills' (2014, 2017) Objective Bayesian Hypothesis Testing framework. It corresponds to the density value at the null (e.g., 0) divided by the density at the Maximum A Posteriori (MAP).
Usage
p_map(x, ...)
p_pointnull(x, ...)
# S3 method for class 'numeric'
p_map(x, null = 0, precision = 2^10, method = "kernel", ...)
# S3 method for class 'get_predicted'
p_map(
x,
null = 0,
precision = 2^10,
method = "kernel",
use_iterations = FALSE,
verbose = TRUE,
...
)
# S3 method for class 'data.frame'
p_map(x, null = 0, precision = 2^10, method = "kernel", rvar_col = NULL, ...)
# S3 method for class 'brmsfit'
p_map(
x,
null = 0,
precision = 2^10,
method = "kernel",
effects = "fixed",
component = "conditional",
parameters = NULL,
...
)Arguments
- x
Vector representing a posterior distribution, or a data frame of such vectors. Can also be a Bayesian model. bayestestR supports a wide range of models (see, for example,
methods("hdi")) and not all of those are documented in the 'Usage' section, because methods for other classes mostly resemble the arguments of the.numericor.data.framemethods.- ...
Currently not used.
- null
The value considered as a "null" effect. Traditionally 0, but could also be 1 in the case of ratios of change (OR, IRR, ...).
- precision
Number of points of density data. See the
nparameter indensity.- method
Density estimation method. Can be
"kernel"(default),"logspline"or"KernSmooth".- use_iterations
Logical, if
TRUEandxis aget_predictedobject, (returned byinsight::get_predicted()), the function is applied to the iterations instead of the predictions. This only applies to models that return iterations for predicted values (e.g.,brmsfitmodels).- verbose
Toggle off warnings.
- rvar_col
A single character - the name of an
rvarcolumn in the data frame to be processed. See example inp_direction().- effects
Should variables for fixed effects (
"fixed"), random effects ("random") or both ("all") be returned? Only applies to mixed models. May be abbreviated.For models of from packages brms or rstanarm there are additional options:
"fixed"returns fixed effects."random_variance"return random effects parameters (variance and correlation components, e.g. those parameters that start withsd_orcor_)."grouplevel"returns random effects group level estimates, i.e. those parameters that start withr_."random"returns both"random_variance"and"grouplevel"."all"returns fixed effects and random effects variances."full"returns all parameters.
- component
Which type of parameters to return, such as parameters for the conditional model, the zero-inflated part of the model, the dispersion term, etc. See details in section Model Components. May be abbreviated. Note that the conditional component also refers to the count or mean component - names may differ, depending on the modeling package. There are three convenient shortcuts (not applicable to all model classes):
component = "all"returns all possible parameters.If
component = "location", location parameters such asconditional,zero_inflated,smooth_terms, orinstrumentsare returned (everything that are fixed or random effects - depending on theeffectsargument - but no auxiliary parameters).For
component = "distributional"(or"auxiliary"), components likesigma,dispersion,betaorprecision(and other auxiliary parameters) are returned.
- parameters
Regular expression pattern that describes the parameters that should be returned. Meta-parameters (like
lp__orprior_) are filtered by default, so only parameters that typically appear in thesummary()are returned. Useparametersto select specific parameters for the output.
Details
Note that this method is sensitive to the density estimation method
(see the section in the examples below).
Strengths and Limitations
Strengths: Straightforward computation. Objective property of the posterior distribution.
Limitations: Limited information favoring the null hypothesis. Relates on density approximation. Indirect relationship between mathematical definition and interpretation. Only suitable for weak / very diffused priors.
Model components
Possible values for the component argument depend on the model class.
Following are valid options:
"all": returns all model components, applies to all models, but will only have an effect for models with more than just the conditional model component."conditional": only returns the conditional component, i.e. "fixed effects" terms from the model. Will only have an effect for models with more than just the conditional model component."smooth_terms": returns smooth terms, only applies to GAMs (or similar models that may contain smooth terms)."zero_inflated"(or"zi"): returns the zero-inflation component."location": returns location parameters such asconditional,zero_inflated, orsmooth_terms(everything that are fixed or random effects - depending on theeffectsargument - but no auxiliary parameters)."distributional"(or"auxiliary"): components likesigma,dispersion,betaorprecision(and other auxiliary parameters) are returned.
For models of class brmsfit (package brms), even more options are
possible for the component argument, which are not all documented in detail
here. See also ?insight::find_parameters.
References
Makowski D, Ben-Shachar MS, Chen SHA, Lüdecke D (2019) Indices of Effect Existence and Significance in the Bayesian Framework. Frontiers in Psychology 2019;10:2767. doi:10.3389/fpsyg.2019.02767
Mills, J. A. (2018). Objective Bayesian Precise Hypothesis Testing. University of Cincinnati.
Examples
library(bayestestR)
p_map(rnorm(1000, 0, 1))
#> MAP-based p-value
#>
#> Parameter | p (MAP)
#> -------------------
#> Posterior | 0.998
p_map(rnorm(1000, 10, 1))
#> MAP-based p-value
#>
#> Parameter | p (MAP)
#> -------------------
#> Posterior | < .001
# \donttest{
model <- suppressWarnings(
rstanarm::stan_glm(mpg ~ wt + gear, data = mtcars, chains = 2, iter = 200, refresh = 0)
)
p_map(model)
#> MAP-based p-value
#>
#> Parameter | p (MAP)
#> ---------------------
#> (Intercept) | < .001
#> wt | < .001
#> gear | 0.963
p_map(suppressWarnings(
emmeans::emtrends(model, ~1, "wt", data = mtcars)
))
#> MAP-based p-value
#>
#> X1 | p (MAP)
#> -----------------
#> overall | < .001
model <- brms::brm(mpg ~ wt + cyl, data = mtcars)
#> Compiling Stan program...
#> Start sampling
#>
#> SAMPLING FOR MODEL 'anon_model' NOW (CHAIN 1).
#> Chain 1:
#> Chain 1: Gradient evaluation took 6e-06 seconds
#> Chain 1: 1000 transitions using 10 leapfrog steps per transition would take 0.06 seconds.
#> Chain 1: Adjust your expectations accordingly!
#> Chain 1:
#> Chain 1:
#> Chain 1: Iteration: 1 / 2000 [ 0%] (Warmup)
#> Chain 1: Iteration: 200 / 2000 [ 10%] (Warmup)
#> Chain 1: Iteration: 400 / 2000 [ 20%] (Warmup)
#> Chain 1: Iteration: 600 / 2000 [ 30%] (Warmup)
#> Chain 1: Iteration: 800 / 2000 [ 40%] (Warmup)
#> Chain 1: Iteration: 1000 / 2000 [ 50%] (Warmup)
#> Chain 1: Iteration: 1001 / 2000 [ 50%] (Sampling)
#> Chain 1: Iteration: 1200 / 2000 [ 60%] (Sampling)
#> Chain 1: Iteration: 1400 / 2000 [ 70%] (Sampling)
#> Chain 1: Iteration: 1600 / 2000 [ 80%] (Sampling)
#> Chain 1: Iteration: 1800 / 2000 [ 90%] (Sampling)
#> Chain 1: Iteration: 2000 / 2000 [100%] (Sampling)
#> Chain 1:
#> Chain 1: Elapsed Time: 0.021 seconds (Warm-up)
#> Chain 1: 0.017 seconds (Sampling)
#> Chain 1: 0.038 seconds (Total)
#> Chain 1:
#>
#> SAMPLING FOR MODEL 'anon_model' NOW (CHAIN 2).
#> Chain 2:
#> Chain 2: Gradient evaluation took 3e-06 seconds
#> Chain 2: 1000 transitions using 10 leapfrog steps per transition would take 0.03 seconds.
#> Chain 2: Adjust your expectations accordingly!
#> Chain 2:
#> Chain 2:
#> Chain 2: Iteration: 1 / 2000 [ 0%] (Warmup)
#> Chain 2: Iteration: 200 / 2000 [ 10%] (Warmup)
#> Chain 2: Iteration: 400 / 2000 [ 20%] (Warmup)
#> Chain 2: Iteration: 600 / 2000 [ 30%] (Warmup)
#> Chain 2: Iteration: 800 / 2000 [ 40%] (Warmup)
#> Chain 2: Iteration: 1000 / 2000 [ 50%] (Warmup)
#> Chain 2: Iteration: 1001 / 2000 [ 50%] (Sampling)
#> Chain 2: Iteration: 1200 / 2000 [ 60%] (Sampling)
#> Chain 2: Iteration: 1400 / 2000 [ 70%] (Sampling)
#> Chain 2: Iteration: 1600 / 2000 [ 80%] (Sampling)
#> Chain 2: Iteration: 1800 / 2000 [ 90%] (Sampling)
#> Chain 2: Iteration: 2000 / 2000 [100%] (Sampling)
#> Chain 2:
#> Chain 2: Elapsed Time: 0.019 seconds (Warm-up)
#> Chain 2: 0.017 seconds (Sampling)
#> Chain 2: 0.036 seconds (Total)
#> Chain 2:
#>
#> SAMPLING FOR MODEL 'anon_model' NOW (CHAIN 3).
#> Chain 3:
#> Chain 3: Gradient evaluation took 4e-06 seconds
#> Chain 3: 1000 transitions using 10 leapfrog steps per transition would take 0.04 seconds.
#> Chain 3: Adjust your expectations accordingly!
#> Chain 3:
#> Chain 3:
#> Chain 3: Iteration: 1 / 2000 [ 0%] (Warmup)
#> Chain 3: Iteration: 200 / 2000 [ 10%] (Warmup)
#> Chain 3: Iteration: 400 / 2000 [ 20%] (Warmup)
#> Chain 3: Iteration: 600 / 2000 [ 30%] (Warmup)
#> Chain 3: Iteration: 800 / 2000 [ 40%] (Warmup)
#> Chain 3: Iteration: 1000 / 2000 [ 50%] (Warmup)
#> Chain 3: Iteration: 1001 / 2000 [ 50%] (Sampling)
#> Chain 3: Iteration: 1200 / 2000 [ 60%] (Sampling)
#> Chain 3: Iteration: 1400 / 2000 [ 70%] (Sampling)
#> Chain 3: Iteration: 1600 / 2000 [ 80%] (Sampling)
#> Chain 3: Iteration: 1800 / 2000 [ 90%] (Sampling)
#> Chain 3: Iteration: 2000 / 2000 [100%] (Sampling)
#> Chain 3:
#> Chain 3: Elapsed Time: 0.021 seconds (Warm-up)
#> Chain 3: 0.02 seconds (Sampling)
#> Chain 3: 0.041 seconds (Total)
#> Chain 3:
#>
#> SAMPLING FOR MODEL 'anon_model' NOW (CHAIN 4).
#> Chain 4:
#> Chain 4: Gradient evaluation took 3e-06 seconds
#> Chain 4: 1000 transitions using 10 leapfrog steps per transition would take 0.03 seconds.
#> Chain 4: Adjust your expectations accordingly!
#> Chain 4:
#> Chain 4:
#> Chain 4: Iteration: 1 / 2000 [ 0%] (Warmup)
#> Chain 4: Iteration: 200 / 2000 [ 10%] (Warmup)
#> Chain 4: Iteration: 400 / 2000 [ 20%] (Warmup)
#> Chain 4: Iteration: 600 / 2000 [ 30%] (Warmup)
#> Chain 4: Iteration: 800 / 2000 [ 40%] (Warmup)
#> Chain 4: Iteration: 1000 / 2000 [ 50%] (Warmup)
#> Chain 4: Iteration: 1001 / 2000 [ 50%] (Sampling)
#> Chain 4: Iteration: 1200 / 2000 [ 60%] (Sampling)
#> Chain 4: Iteration: 1400 / 2000 [ 70%] (Sampling)
#> Chain 4: Iteration: 1600 / 2000 [ 80%] (Sampling)
#> Chain 4: Iteration: 1800 / 2000 [ 90%] (Sampling)
#> Chain 4: Iteration: 2000 / 2000 [100%] (Sampling)
#> Chain 4:
#> Chain 4: Elapsed Time: 0.019 seconds (Warm-up)
#> Chain 4: 0.02 seconds (Sampling)
#> Chain 4: 0.039 seconds (Total)
#> Chain 4:
p_map(model)
#> MAP-based p-value
#>
#> Parameter | p (MAP)
#> ---------------------
#> (Intercept) | < .001
#> wt | 0.002
#> cyl | 0.005
bf <- BayesFactor::ttestBF(x = rnorm(100, 1, 1))
p_map(bf)
#> MAP-based p-value
#>
#> Parameter | p (MAP)
#> --------------------
#> Difference | < .001
# ---------------------------------------
# Robustness to density estimation method
set.seed(333)
data <- data.frame()
for (iteration in 1:250) {
x <- rnorm(1000, 1, 1)
result <- data.frame(
Kernel = as.numeric(p_map(x, method = "kernel")),
KernSmooth = as.numeric(p_map(x, method = "KernSmooth")),
logspline = as.numeric(p_map(x, method = "logspline"))
)
data <- rbind(data, result)
}
data$KernSmooth <- data$Kernel - data$KernSmooth
data$logspline <- data$Kernel - data$logspline
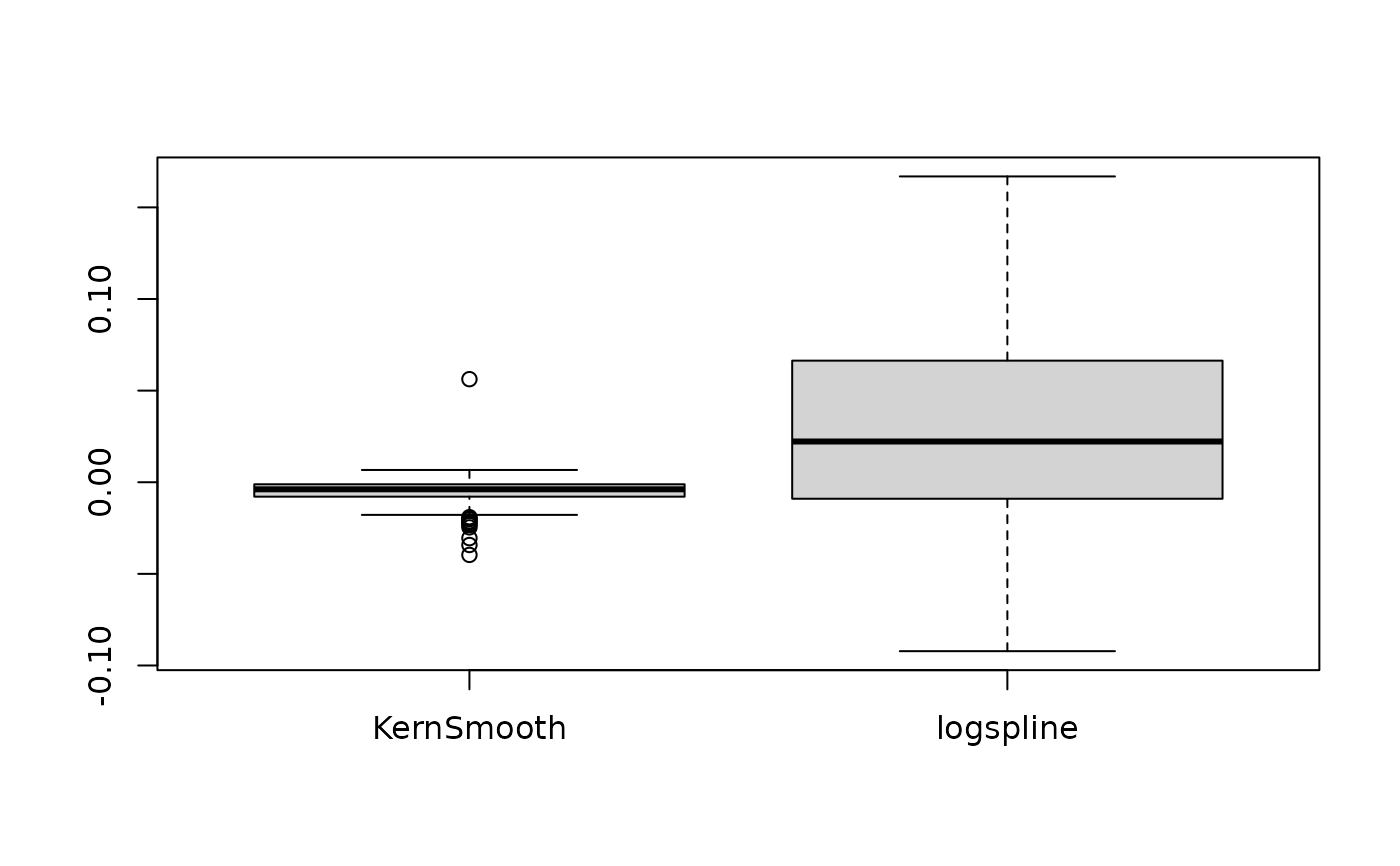
summary(data$KernSmooth)
#> Min. 1st Qu. Median Mean 3rd Qu. Max.
#> -0.039724 -0.007909 -0.003885 -0.005338 -0.001128 0.056325
summary(data$logspline)
#> Min. 1st Qu. Median Mean 3rd Qu. Max.
#> -0.092243 -0.009008 0.022214 0.026966 0.066303 0.166870
boxplot(data[c("KernSmooth", "logspline")])
 # }
# }